Thanks for the suggestions and pictures optiman. That chassis you have is nicely narrow, looks cool!

It's a shame you couldn't get it to work well for you.
The car is indeed for offroad. And yes, my prototype indeed tends to nose-dive when driven like a RWD Buggy, but...
...I found only one situation where the car reaaally nose-dived. It was when I was using full power to the motor when I was on the ramp - usually in desperation to get enough speed for the jump.
The thing is, when that happens the wheels don't spin up up a lot anymore because they were already spinning so quickly with all the wheelspin - this lack of acceleration of the front wheels in air causes the car to nose-dive (in fact, my rear motor RWD buggy shows similar behaviour in those situations).
So though it sounds strange, but what I've found is that it's down to driving style/technique: it's essential to prevent excessive wheelspin - it's better for your pace (unless you are running on a surface like loose dirt where tires need to dig in to grip). Preventing wheelspin in general will be good enough to clear jumps in a neat way (all the jumps I've tried, anyway).
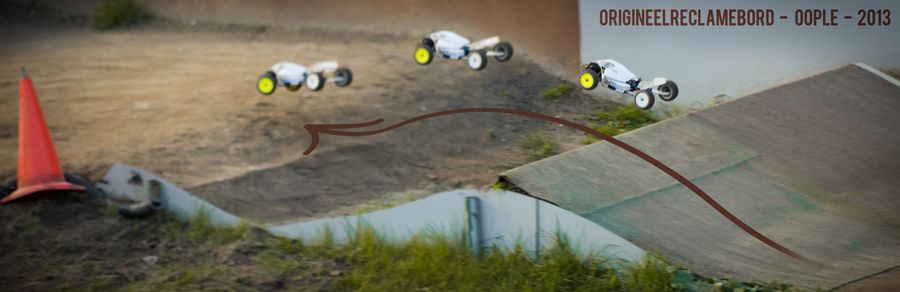
And just in case you do need to make some serious corrections to the heading of your car, make sure you have some throttle left to play with when you get off the ramp. This means you need a motor that can make those extra spins in mid-air even if you didn't have any wheelspin. The last proto had a 4000kV motor in it - I think it equates to about 8.5-10.5T - and that was fine for a normal length of jump - in fact, I could make it land on it's rear wheels first with that motor:
The upcoming proto will run with a 6.5T/5200kV motor, exactly the same brushless set as I run in my RWD. Nice to compare the cars' pace on the track, and with this I can't complain about a lack of power, that's for sure

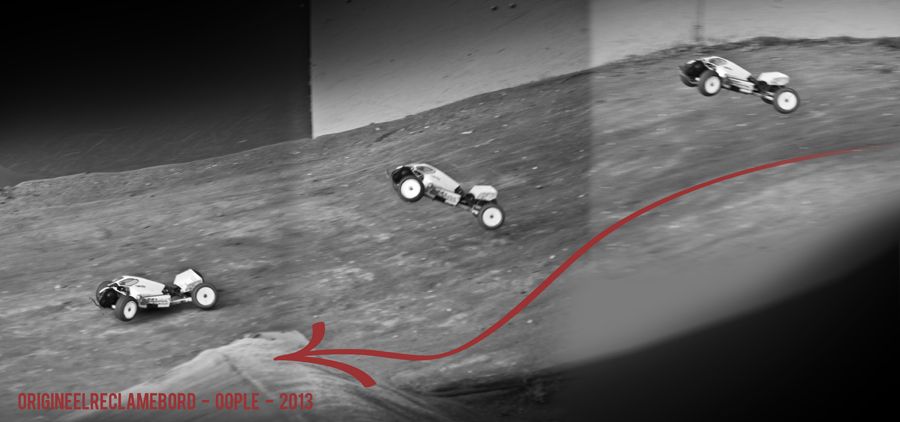
And as another reference, this was a jump at a very modest rate of throttle to clear the 90 degree turn after the jump: